技术专栏
2022-03-06
浅谈BLDC-无刷直流电机的控制
※无刷电机简介
一个使用有刷电机的运动系统可以提供一个好的,简单且有效率的解决方案满足可变速度驱动的要求。
虽然有刷电机有良好控制特性及耐用性,但其性能与运用的范围因为有火花与换相问题而有所限制。
由于近代科技的进步与微控制器的运算处理和控制技巧的发展,无刷电机不再需要藉由机械式电刷换相(mechanical commutation)结构来完成电流相位变换;相反地,是采用电子式换相(electronic commutation)来达成需求。
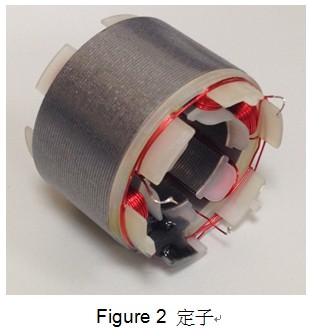
跟有刷电机一样的是无刷电机也有线圈跟永久磁铁的部分。但差异点在于,对无刷电机(Figure 3)而言,线圈现在是附着在定子(Figure 2)上,而转子(Figure 1) 转子是永久磁铁做的。
转子上的永久磁铁生成磁通,而通电的定子绕组产生磁极。藉由使用适当的序列为定子相位供电,便可在定子上形成一个旋转磁场。转子跟随着旋转的磁极便会产生转矩而旋转。


对无刷电机来说,这种新的机械结构的安排,相较于有刷电机,提供了一些优势,其中包括:
● 较好的速度-力矩特性: 无刷电机不再因有刷结构的接触摩擦而损失输出力矩。
● 高动态反应: 因无刷电机的转子是由永久磁铁组成,可以有较低的转动惯量。
● 高效率与可靠性: 无刷电机不再有换相结构上因接触问题而导致的电压降(损失)等等问题
● 长时操作寿命: 无刷电机无须考量电刷换相结构的后续维护
● 较低的电子噪杂音: 因为没有电刷换相时的电弧所产生的电子讯号杂讯而引发电磁干扰的问题。
● 较高的速度范围: 无刷电机没有电刷换相接触部分的限制
● 可改善的电机特性: 无刷电机因改用电子式换相,可利用电路技术来改善换相行为。
有着这些优势,无刷电机在很多应用场合上扮演着重要的角色,其中包括:
§ 汽机车产业应用:
(1) 电动车以及混和动力车辆
(2) 电动摩托车以及电动脚踏车
(3) 电动滑板
§ 家庭设备:
(1) 搅拌机
(2) 手持电动工具
(3) 电扇
(4) 扫地机器人
(5) 抽排油烟机
(6) 洗衣机
(7) 室内空调设备以及冰箱
§ 工业应用:
(1) 线性电机
(2) 伺服电机
(3) 射出成形设备
(4) 工业机器人
(5) 自动搬运设备
※无刷电机运行原理
基本的电机电机是一种可以将电能转换成机械能的设备。
这种能量的转换起始于将电流导入一根或数根的导线的方式来产生磁力场。
接下来,因为磁场的极性关系,使得导线产生的磁场与永久磁铁产生相吸或相斥的力量而引起移动。
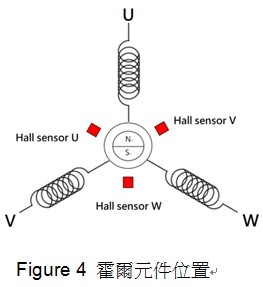
在无刷电机上,为了能产生特定的磁场顺序去驱动转子,则需要知道转子上永久磁铁的位置。两个主要用来侦测转子位置的方式有:
● 霍尔感应器: 安装在定子上来侦测转子的位置,提供功率元件的触发时序(Figure 4)。
● 反电动势讯号侦测: 此侦测方式为无感测器(sensorless)的主要技术。藉由量测未激磁相的端电压(反电动势)来估测电机转子的位置。因为使用反电动势的讯号作为转子位置的讯息,所以在静止与启动之间(尚未建立或未识别出反电动势讯号前)需要做特别的控制处理。
藉由上述两种方式而得到转子位置的资讯来切换电流流经的路径,便可以使无刷电机完成换相并开始周期性的旋转行为。
无刷电机较常用的换相技术有六步(six-step)方波,弦波以及磁场导向控制(FOC)(或称向量控制(vector control))。
1. 六步方波
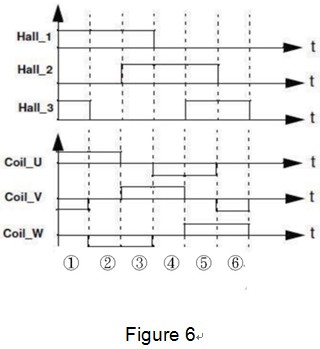
使用六步方波的驱动方式时,多数直接采用霍尔感应元件来感测转子的位置。这是一种简单的也是最受欢迎的驱动方式。以一个常用的三相电机为例子,以电气角的变换观点来看,其相电流导通120度电气角后,关闭60度,接着以反方向导通120度后再关闭60度(Figure 6)。主要的控制原则就是让电流只流过三组绕线中的两组绕线,便可以让无刷电机产生转动。
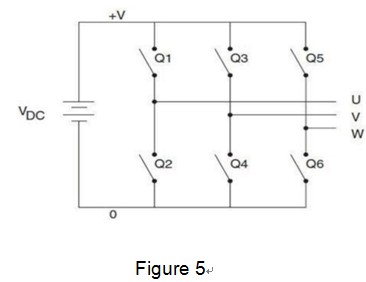
在六步方波的驱动方式下,如果霍尔感应器是被用来侦测转子位置,则桥式变换器的开启与关闭时机便如Figure 6所示。
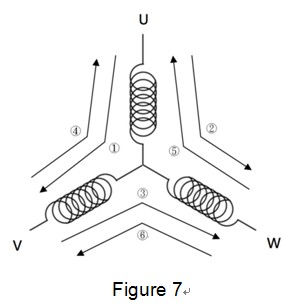
三相电流流动的方向如Figure 7所标示。
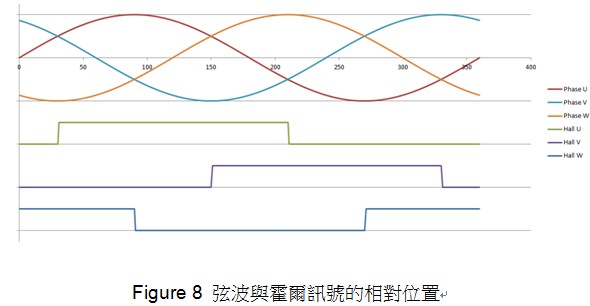
1. 弦波
以弦波取代方波来驱动无刷电机。在每相线圈中依特定时序施加弦波形式的电压来控制电机电流的流入与流出。采取此方式来驱动电机达时,仅以霍尔元件所感测的转子位置的解析度是不足的。通常还需有一高解析度的感测器来回授转子位置。
2. 磁场导向控制(FOC)
此控制方法需较为复杂的电路设计以及高运算能力的微控制器。此方式是采取计算电流与电压向量为基础来决定电机的换相时机。此方式主要是以控制电流为主,所以可使用在一些经常切换速度但要求特定力矩输出的应用场合。
※速度-力矩 图
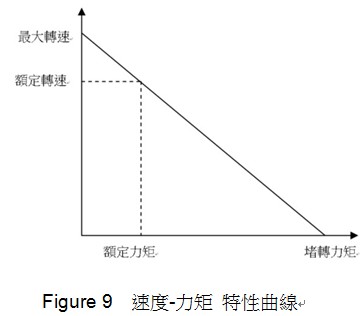
Figure 9是一般常见的无刷电机的速度-力矩图。无刷电机的两个力矩参数包含堵转力矩以及额定力矩。
堵转力矩是在图面上的一点,当电机输出轴不旋转,但力矩输出为最大值的点。
额定力矩是图面上的另一点,是当电机运转时运作在较高效率的点。
在给定的应用中,选择正确形式的电机是非常重要的。而所依据的参数中包括最大输出力矩以及期望的速度操作范围。
如果应用中有很频繁的启动及停止,甚至是在有额外的外在负载下频繁的反转,则电机将会被操作在额定输出力矩跟堵转力矩中间的区域。当电机开始旋转时是处于从静止的状态进入加速的状态时,须有较大的输出力矩用以克服外部负载以及电机本身的惯量。在此阶段,甚至会需要用到最大的力矩,也就是堵转力矩。
如果应用上并无频繁的速度变化,则可以让电机操作在额定的速度。当电机应用在某一特定的操作速度区间时,选择电机的额定速度高于平均的运行速度是较为保险的作法。
※无刷电机的应用
● 固定负载的应用
在一些应用上,允许稍微的速度变化比维持精准的速度来的重要。这些应用中,其负载通常是直接与电机输出轴结合的,比如风扇。这种应用通常要求的是低成本的控制器,运作方式主要是采用所谓的开回路。
● 变动负载的应用
这种应用是要求电机的速度变化范围要很广泛。这些应用例子也许会要求高速控制的精确度并且有好的动态反应。常见的应用包含在一般家庭的电动设备,洗(干)衣机,冷气压缩机,帮浦以及机器人。
● 定位应用
在这个应用范畴中,通常系统是需要使用闭回路控制。主要的控制功能须包含力矩控制,速度控制以及位置控制。为达到闭回路控制,亦须要有所谓的感测器(比如:编码器)来提供电机的实际速度与位置。